DYLAN HAWLEY
👈 Back to all workVisual Localization for CubeRover
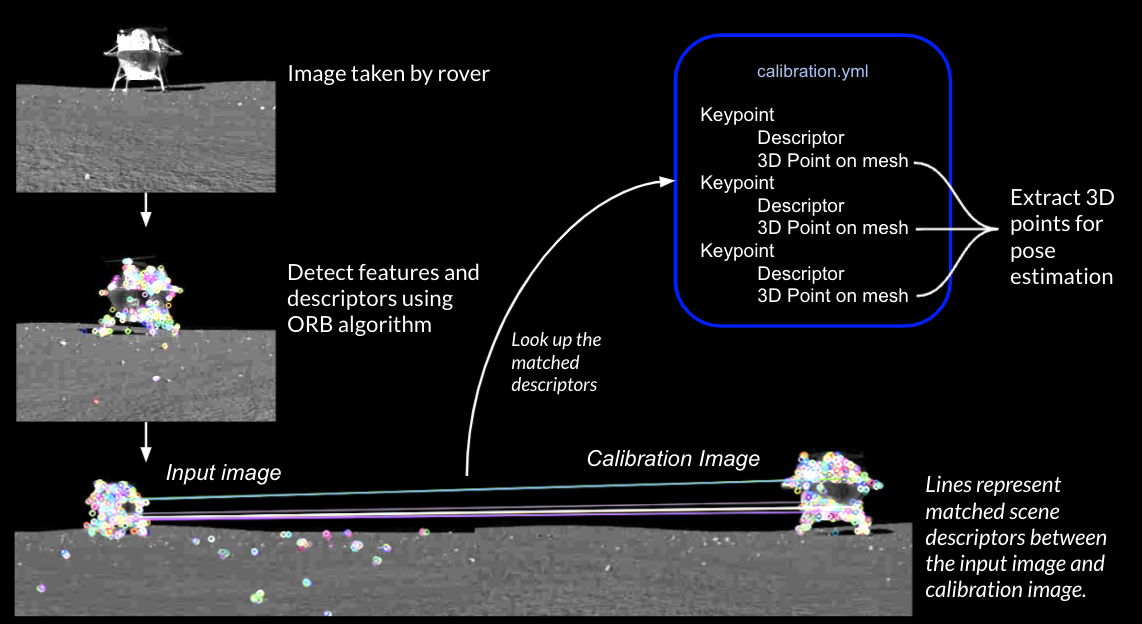
Given a set of n 3D points in a world reference frame and their corresponding 2D image projections as well as the calibrated intrinsic camera parameters, determine the 6 DOF pose of the camera in the form of its rotation and translation with respect to the world.